



摘要:目的 開發(fā)設(shè)計(jì)生鮮豬肉品質(zhì)無損在線檢測(cè)系統(tǒng)。方法 通過用可見近紅外光譜技術(shù), 基于VC++和Matlab語言, 開發(fā)與計(jì)算機(jī)硬件和Windows XP軟件環(huán)境兼容的手持式豬肉品質(zhì)無損實(shí)時(shí)檢測(cè)系統(tǒng)。結(jié)果 設(shè)計(jì)出開放式、模塊化、集成化的檢測(cè)系統(tǒng),可實(shí)現(xiàn)光譜數(shù)據(jù)的多點(diǎn)自動(dòng)采集、光譜曲線的動(dòng)態(tài)顯示、數(shù)據(jù)的實(shí)時(shí)處理、樣品品質(zhì)的自動(dòng)預(yù)測(cè)等功能,通過一鍵觸發(fā)開關(guān)可完成從樣本多點(diǎn)信息的采集到結(jié)果預(yù)測(cè)與保存的全過程。用該系統(tǒng)對(duì)豬肉水分含量進(jìn)行檢測(cè)的實(shí)驗(yàn)結(jié)果表明,系統(tǒng)對(duì)參數(shù)的檢測(cè)精度能滿足檢測(cè)要求。結(jié)論 該系統(tǒng)軟件界面友好,操作方便, 后續(xù)可擴(kuò)展檢測(cè)其他品質(zhì)參數(shù), 進(jìn)一步推廣用于企業(yè)生產(chǎn)線。
關(guān)鍵詞:手持式系統(tǒng);豬肉;品質(zhì);可見/近紅外光譜;無損檢測(cè);系統(tǒng)設(shè)計(jì)
1 引 言
掌握生鮮肉的主要品質(zhì)特性,有利于對(duì)生鮮豬肉進(jìn)行等級(jí)劃分和按質(zhì)論價(jià),進(jìn)一步規(guī)范生鮮豬肉加工銷售市場(chǎng)。目前生鮮豬肉生產(chǎn)加工、銷售和檢測(cè)部門對(duì)肉品品質(zhì)的檢測(cè)評(píng)估基本上是采用人工感官評(píng)定和理化檢測(cè)等方法。這些檢測(cè)方法耗時(shí)長(zhǎng)、效率低、對(duì)樣品有不同程度的破壞,且檢測(cè)結(jié)果受操作人員技術(shù)水平的影響,存在一定的主觀性。另外,這些檢測(cè)方法只能進(jìn)行抽樣檢測(cè),不能適應(yīng)現(xiàn)代快節(jié)奏的生產(chǎn)節(jié)拍。因此迫切需要研究能對(duì)生鮮肉品質(zhì)進(jìn)行快速、無損、在線檢測(cè)的方法和裝備,以滿足實(shí)際生產(chǎn)的需要??梢娊t外光譜分析技術(shù)因具有分析效率高、檢測(cè)速度快、對(duì)樣品無需預(yù)處理和破壞等特點(diǎn)已逐漸應(yīng)用于農(nóng)畜產(chǎn)品品質(zhì)的快速無損檢測(cè)。包括豬肉分類檢測(cè)、揮發(fā)性鹽基氮檢測(cè)、水分含量檢測(cè)、細(xì)菌總數(shù)檢測(cè)、多品質(zhì)參數(shù)檢測(cè)、牛肉水分含量檢測(cè)等?,F(xiàn)有研究也證明了該檢測(cè)技術(shù)具有對(duì)農(nóng)畜產(chǎn)品進(jìn)行快速在線檢測(cè)的潛力,并開發(fā)了一些用于檢測(cè)的裝備。在前期基礎(chǔ)研究的基礎(chǔ)上,結(jié)合社會(huì)和企業(yè)的實(shí)際需求,利用生鮮豬肉眼肌的光譜特征,進(jìn)行生鮮豬肉品質(zhì)無損在線檢測(cè)軟硬件系統(tǒng)的研究,旨在開發(fā)方便企業(yè)加工生產(chǎn)線和銷售市場(chǎng)使用的手持式檢測(cè)裝置,為生鮮豬肉品質(zhì)的實(shí)時(shí)檢測(cè)和等級(jí)的劃分提供技術(shù)支持。
2 檢測(cè)系統(tǒng)總體設(shè)計(jì)
2.1 系統(tǒng)組成
該檢測(cè)系統(tǒng)由硬件和軟件2部分組成。所構(gòu)建系統(tǒng)的結(jié)構(gòu)示意圖如圖1所示。
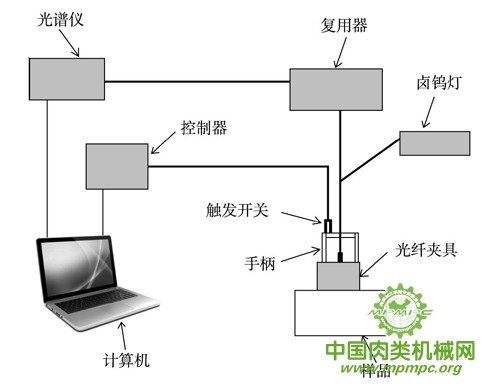
圖1 系統(tǒng)結(jié)構(gòu)圖示意
其中硬件主要由計(jì)算機(jī)、光譜儀、多路復(fù)用器、檢測(cè)探頭、鹵鎢燈光源、控制器、握持手柄和觸發(fā)開關(guān)等組成。軟件由上位機(jī)軟件和下位機(jī)軟件2部分組成。其中核心部分是光譜數(shù)據(jù)的多點(diǎn)采集、實(shí)時(shí)處理、樣品信號(hào)的自動(dòng)檢測(cè)以及結(jié)果的實(shí)時(shí)預(yù)測(cè)。硬件系統(tǒng)加之開發(fā)的配套軟件組成一個(gè)完整的檢測(cè)系統(tǒng)。
2.2 工作過程
系統(tǒng)工作過程如下,將待檢測(cè)樣品放置于檢測(cè)平臺(tái)上,操作人員握持手柄,將檢測(cè)探頭放置在所需檢測(cè)的樣品表面,通過外觸發(fā)方式手動(dòng)按下外觸發(fā)開關(guān),觸發(fā)光譜儀按照設(shè)定的順序進(jìn)行光譜信息的多點(diǎn)采集,通過所開發(fā)的軟件進(jìn)行數(shù)據(jù)的接收和處理。每按下一次開關(guān),觸發(fā)1次光譜儀實(shí)時(shí)采集光譜信息,信息經(jīng)處理單元進(jìn)行在線處理,系統(tǒng)會(huì)將待檢測(cè)參數(shù)的檢測(cè)結(jié)果進(jìn)行實(shí)時(shí)預(yù)測(cè)和顯示,并將該結(jié)果自動(dòng)保存。
3 系統(tǒng)硬件組成
檢測(cè)系統(tǒng)硬件組成如圖1所示。
光譜信息采集裝置主要由光譜儀、光纖多路復(fù)用器、鹵鎢燈光源、光纖探頭和計(jì)算機(jī)(personal computer, PC)等組成。其中光譜儀是系統(tǒng)的核心部件,根據(jù)檢測(cè)對(duì)象,選用波長(zhǎng)范圍為350~1100nm的可見近紅外光纖光譜儀,采用線陣CCD探測(cè)器,光譜分辨率為2.4nm,采樣間隔為0.5nm。
為提高檢測(cè)精度和模型的穩(wěn)定性,系統(tǒng)中采用FOM-IR 400-2x8型光纖多路復(fù)用器和4條光纖探頭采集樣品上4個(gè)不同點(diǎn)的光譜信息。通過該復(fù)用器可實(shí)現(xiàn)在同一條件下一次完成多個(gè)不同部位的光譜信息的采集,有效解決了單個(gè)檢測(cè)探頭單點(diǎn)測(cè)量精度低、單個(gè)檢測(cè)探頭多點(diǎn)重復(fù)測(cè)量效率低和檢測(cè)條件不一致等問題。
系統(tǒng)所用光源為集成的光纖鹵鎢燈點(diǎn)光源,為提高到樣品表面的光照強(qiáng)度,每條探測(cè)光纖分別配置一臺(tái)鹵鎢燈。光源有效波長(zhǎng)范圍為200~2100nm,功率為14W,功率穩(wěn)定性為±1%。
為確保檢測(cè)時(shí)4條光纖探頭與樣品之間的距離保持一致,系統(tǒng)中設(shè)計(jì)加工了用于固定安裝多條光纖的手持式光纖探頭夾具,結(jié)構(gòu)如圖2。該夾具中的光纖探頭固定沉孔與夾具下端面的距離是2mm。該結(jié)構(gòu)也同時(shí)確保光譜信息采集時(shí)能自行形成一個(gè)暗室,避免外界自然光對(duì)光譜信息的影響。另外光纖探頭夾具上安裝有手柄,如圖2所示。手柄上設(shè)計(jì)安裝有觸發(fā)開關(guān),用于檢測(cè)時(shí)產(chǎn)生外觸發(fā)動(dòng)作。通過觸發(fā)該按鈕,控制器就可以接收外觸發(fā)信號(hào)。該觸發(fā)信號(hào)通過單片機(jī)的串口模塊和計(jì)算機(jī)主機(jī)之間實(shí)時(shí)通信。每按下一次開關(guān),觸發(fā)采集1次,通過檢測(cè)軟件進(jìn)行數(shù)據(jù)的接收與處理。當(dāng)松開按鈕后,系統(tǒng)還原到初始待觸發(fā)狀態(tài)。
4 系統(tǒng)軟件實(shí)現(xiàn)
該檢測(cè)系統(tǒng)軟件以PC為硬件平臺(tái),開發(fā)環(huán)境為Windows XP系統(tǒng),開發(fā)工具采用支持可視化編程、具有靈活的數(shù)據(jù)庫(kù)管理功能的VC++6.0語言和具有強(qiáng)大的科學(xué)計(jì)算能力的Matlab語言進(jìn)行混合編程。
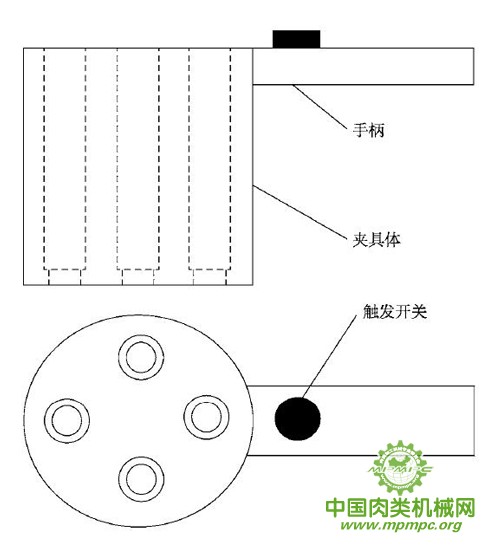
圖2 光纖探頭夾具
4.1 軟件功能
所開發(fā)的檢測(cè)軟件的主要任務(wù)是對(duì)生鮮豬肉樣本的光譜數(shù)據(jù)進(jìn)行自動(dòng)采集、在線處理、分析與光譜曲線實(shí)時(shí)顯示,利用已建立的預(yù)測(cè)模型對(duì)樣本的相應(yīng)參數(shù)進(jìn)行實(shí)時(shí)預(yù)測(cè),并可根據(jù)需要將所采集和處理的數(shù)據(jù)自動(dòng)保存,以期最終實(shí)現(xiàn)生鮮豬肉主要品質(zhì)參數(shù)的自動(dòng)檢測(cè)。
根據(jù)軟件功能需求分析構(gòu)建了如圖3所示的軟件功能結(jié)構(gòu)模塊。該系統(tǒng)軟件可根據(jù)檢測(cè)需要對(duì)光譜儀和光纖多路復(fù)用器的相關(guān)參數(shù)進(jìn)行設(shè)置,對(duì)系統(tǒng)黑白參考進(jìn)行校正。完成對(duì)樣品光譜數(shù)據(jù)的實(shí)時(shí)采集、顯示和預(yù)處理。并可根據(jù)需要將采集和處理的數(shù)據(jù)自動(dòng)保存。結(jié)合前期實(shí)驗(yàn)及預(yù)測(cè)模型的建立,軟件中光譜數(shù)據(jù)用歸一化方法(standard normal variate,SNV)預(yù)處理,建模采用偏最小二乘回歸(partial least squares regression,PLSR)建模。最后將所建的預(yù)測(cè)模型植入系統(tǒng)軟件, 可以實(shí)時(shí)預(yù)測(cè)所要檢測(cè)的品質(zhì)參數(shù),并通過顯示模塊實(shí)時(shí)顯示。數(shù)據(jù)的管理與存儲(chǔ)也是系統(tǒng)不可或缺的部分,通過數(shù)據(jù)庫(kù)管理模塊可實(shí)現(xiàn)數(shù)據(jù)的管理和查詢。
檢測(cè)系統(tǒng)上位機(jī)程序主要完成參數(shù)設(shè)置、光譜信息采集與顯示、光譜數(shù)據(jù)的處理、品質(zhì)參數(shù)的預(yù)測(cè)與顯示、人機(jī)交互、文件編輯和管理等功能。檢測(cè)系統(tǒng)下位機(jī)程序主要完成系統(tǒng)樣品信號(hào)的檢測(cè)、光譜儀觸發(fā)控制等。軟件用VC++6.0實(shí)現(xiàn)界面設(shè)計(jì)、光譜數(shù)據(jù)的采集、端口操作和數(shù)據(jù)管理等功能模塊,用Matlab語言完成較為復(fù)雜的數(shù)據(jù)預(yù)處理、建模及參數(shù)預(yù)測(cè)等部分功能模塊。
軟件有2種操作模式: 軟件操作模式和外觸發(fā)模式。當(dāng)采用軟件操作模式時(shí),通過點(diǎn)擊軟件界面內(nèi)對(duì)應(yīng)的按鈕實(shí)現(xiàn)相應(yīng)的功能;當(dāng)采用外觸發(fā)模式時(shí),按下手柄上的開關(guān)按鈕,通過一鍵觸發(fā)開關(guān)可完成從樣本多點(diǎn)信息的采集到結(jié)果預(yù)測(cè)與保存的全過程。結(jié)合一鍵觸發(fā)的硬件系統(tǒng),該軟件的外觸發(fā)控制模塊可接收處理外部觸發(fā)信號(hào)。

圖3 檢測(cè)系統(tǒng)功能框圖
系統(tǒng)采用VC++6.0的MFC基礎(chǔ)類庫(kù)開發(fā),所有模塊都通過主程序進(jìn)行調(diào)用和整合,通過友好的人機(jī)交互界面進(jìn)行操作。
4.2 軟件系統(tǒng)界面
所設(shè)計(jì)的人機(jī)交互界面如圖4所示。
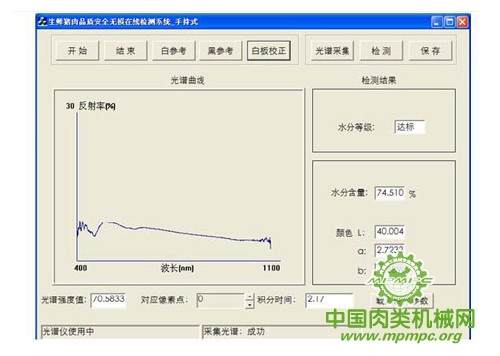
圖4 檢測(cè)系統(tǒng)操作界面
整個(gè)界面分為4大部分,分別是操作功能按鈕區(qū)域、光譜曲線顯示區(qū)域、光譜數(shù)據(jù)及信息顯示區(qū)域、預(yù)測(cè)結(jié)果顯示區(qū)域。系統(tǒng)界面友好,操作方便。
5 系統(tǒng)驗(yàn)證
用所研制的手持式檢測(cè)系統(tǒng)對(duì)生鮮豬肉的品質(zhì)參數(shù)進(jìn)行實(shí)時(shí)檢測(cè),以驗(yàn)證該系統(tǒng)的檢測(cè)應(yīng)用效果。實(shí)驗(yàn)過程中采用一鍵觸發(fā)模式對(duì)樣本進(jìn)行在線檢測(cè)。
實(shí)驗(yàn)分為2部分,首先將不同品質(zhì)的生鮮豬肉樣本通過該檢測(cè)系統(tǒng)進(jìn)行品質(zhì)參數(shù)模型的建立與預(yù)測(cè)。然后通過該檢測(cè)系統(tǒng)和所建立的模型對(duì)獨(dú)立的樣本集進(jìn)行在線預(yù)測(cè),用于驗(yàn)證系統(tǒng)和預(yù)測(cè)模型的檢測(cè)精度和穩(wěn)定性。
實(shí)驗(yàn)所用樣本為當(dāng)天屠宰的不同新鮮豬胴體上的眼肌,剔除脂肪或結(jié)締組織, 將肉樣尺寸修整為約3cm厚的肉塊,用自封袋包裝存儲(chǔ)于4℃冰箱。采集光譜時(shí)將肉樣在室溫下靜置約30min,用濾紙沾拭樣品表面的水分,以避免表面殘留水分對(duì)光譜曲線的影響。用75個(gè)樣品建立預(yù)測(cè)模型,22個(gè)樣品用于模型和系統(tǒng)驗(yàn)證。
系統(tǒng)參數(shù)設(shè)置如下:光譜儀的積分時(shí)間為2.17 ms、平均次數(shù)為20次、平滑次數(shù)為3次;光纖多路復(fù)用器采用第1至第4共4個(gè)通道;光纖探頭與樣品表面之間的距離為2mm。
采集完光譜數(shù)據(jù)后,立即進(jìn)行樣本水分含量標(biāo)準(zhǔn)值的檢測(cè)。水分標(biāo)準(zhǔn)值的測(cè)定參照國(guó)標(biāo)GB 5009.3-2010(食品中水分的測(cè)定),測(cè)量的水分含量用于對(duì)照。
首先采集了其中的建模用的樣本集的75個(gè)樣品的光譜數(shù)據(jù),截取了光譜中信噪比較高的380~1080nm波段進(jìn)行分析, 采用Matlab7.6軟件進(jìn)行分析處理建模,對(duì)原始光譜分別進(jìn)行多元散射校正(multiplicative scatter correction,MSC)預(yù)處理和(standard normal variate, SNV)預(yù)處理,結(jié)合偏最小二乘(partial least squares regression,PLSR)建模,水分含量的建模預(yù)測(cè)結(jié)果見表1。
表1 水分含量在線模型預(yù)測(cè)結(jié)果
| 預(yù)處理 | 最佳主成分?jǐn)?shù) | 校 正 集 | 預(yù) 測(cè) 集 | ||
| 相關(guān)系數(shù)Rc | 標(biāo)準(zhǔn)偏差RMSEC | 相關(guān)系數(shù)Rv | 標(biāo)準(zhǔn)偏差RMSEP | ||
| MSC | 7 | 0.764 | 0.675 | 0.604 | 1.098 |
| SNV | 7 | 0.891 | 0.571 | 0.870 | 0.653 |
水分含量的預(yù)測(cè)結(jié)果表明, 經(jīng)SNV預(yù)處理后結(jié)合PLSR建模,預(yù)測(cè)結(jié)果較好,校正集相關(guān)系數(shù)Rc、預(yù)測(cè)集相關(guān)系數(shù)Rv分別為0.891和0.870,校正集標(biāo)準(zhǔn)偏差RMSEC、預(yù)測(cè)集標(biāo)準(zhǔn)偏差RMSEP分別為0.571和0.653。因此該系統(tǒng)將經(jīng)SNV預(yù)處理后的預(yù)測(cè)模型作為系統(tǒng)的輸入模型。
在相同的實(shí)驗(yàn)條件下,用獨(dú)立驗(yàn)證集的22個(gè)樣品進(jìn)行在線驗(yàn)證。首先將上述預(yù)測(cè)模型植入所開發(fā)的軟件系統(tǒng),然后通過該系統(tǒng)在線采集光譜、在線處理和在線預(yù)測(cè),通過系統(tǒng)自動(dòng)記錄所預(yù)測(cè)的水分含量的預(yù)測(cè)值。然后迅速通過理化方法進(jìn)行水分含量理化標(biāo)準(zhǔn)值的測(cè)定。獨(dú)立驗(yàn)證樣本集的22個(gè)樣本的光譜曲線和經(jīng)SNV預(yù)處理后的光譜曲線如圖5(a)、(b)所示。
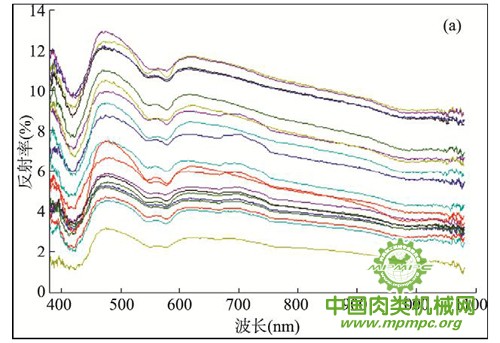
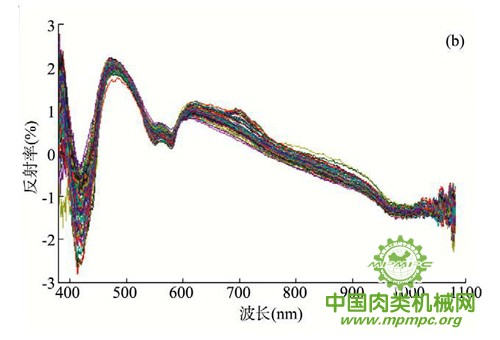
(a) 原始光譜曲線, (b) SNV后的光譜曲線
圖5 光譜曲線
將系統(tǒng)的預(yù)測(cè)結(jié)果與理化標(biāo)準(zhǔn)值進(jìn)行比對(duì),其在線預(yù)測(cè)的相關(guān)系數(shù)如表2所示。
表2 獨(dú)立樣本集在線預(yù)測(cè)結(jié)果
| 系統(tǒng) | 參數(shù) | R |
| 手持在線 | 水分含量 | 0.814 |
6 結(jié)束語
基于可見近紅外光譜技術(shù)構(gòu)建了手持式生鮮豬肉品質(zhì)參數(shù)實(shí)時(shí)檢測(cè)系統(tǒng)硬件、開發(fā)了配套的系統(tǒng)軟件。文中闡述了硬件實(shí)時(shí)檢測(cè)系統(tǒng)的基本結(jié)構(gòu)、各部分的工作原理和檢測(cè)過程。介紹了在線檢測(cè)軟件的開發(fā)過程和流程。通過一鍵觸發(fā)開關(guān)可完成從樣本多點(diǎn)信息的采集到結(jié)果預(yù)測(cè)與保存的全過程。用該系統(tǒng)對(duì)豬肉水分含量進(jìn)行了在線試驗(yàn)檢測(cè)。該系統(tǒng)軟件界面友好,操作方便,后續(xù)可擴(kuò)展檢測(cè)其他品質(zhì)參數(shù), 進(jìn)一步推廣用于企業(yè)生產(chǎn)線。

用")

