



摘要:目的 設(shè)計(jì)一種食品機(jī)械自動(dòng)定量填充系統(tǒng)。方法 以可編程邏輯控制器(programmable logic controller, PLC)為核心設(shè)計(jì)控制系統(tǒng),并采用模糊比例-積分-微分控制算法(proportion integral derivative, PID) 提高填充控制系統(tǒng)的精度以及穩(wěn)定性。結(jié)果 在400g重量段,填充重量為(400.35±4.692)g,填充時(shí)間平均值為(4.97±0.170)s;在800g重量段,填充重量平均值(800.47±7.098)g,填充時(shí)間平均值為(5.92±0.123)s;在900g重量段,填充重量平均值(899.98±8.870)g,填充時(shí)間平均值為(6.43±0.080)s,填充質(zhì)量變化率小于2%,并且填充時(shí)間小于7s。結(jié)論 該設(shè)計(jì)食品填充精度高,機(jī)械穩(wěn)定性和安全性高, 對(duì)現(xiàn)有食品包裝機(jī)械裝置具有很大的借鑒意義,有較大的推廣價(jià)值。
關(guān)鍵詞:可編程邏輯控制器;模糊控制;模糊比例-積分-微分控制器
1 引 言
隨著我國市場(chǎng)經(jīng)濟(jì)的高速發(fā)展和人民生活水平的提高, 散裝、大包裝食品已經(jīng)逐步淡出人們的視線,精致的小食品包裝越來越普遍。但我國許多企業(yè)還在人工定量包裝,不僅不衛(wèi)生,其精度也比較低。而采用機(jī)械灌裝的企業(yè),其食品灌裝雖然相對(duì)衛(wèi)生,但精度不夠準(zhǔn)確,因此在生產(chǎn)過程中存在極大的浪費(fèi)。由于美國、德國、日本等發(fā)達(dá)國家在食品包裝行業(yè)發(fā)展較早,而且進(jìn)行持續(xù)的研究,這些國家實(shí)現(xiàn)了較高程度的自動(dòng)化,其通用食品包裝機(jī)械可以較為精確地填充不同種類,不同規(guī)格的產(chǎn)品,而且其機(jī)械穩(wěn)定性強(qiáng),受到國內(nèi)大型食品企業(yè)的廣泛喜歡。國內(nèi)食品包裝設(shè)備制造企業(yè)的規(guī)模較小,研發(fā)力量薄弱,大多是對(duì)國外同類設(shè)備進(jìn)行仿造或者行業(yè)間相互抄襲。該類設(shè)備中硬件保證其正常、安全運(yùn)行,軟件實(shí)力決定了其精度及穩(wěn)定性。因此食品包裝機(jī)械從技術(shù)到制造上都要尋求創(chuàng)新,本研究就是將模糊比例-積分-微分控制算法(proportion integral derivative, PID)引入食品包裝定量填充機(jī)械系統(tǒng)中,從而提高填充精度,加快反應(yīng)速度,加強(qiáng)系統(tǒng)的穩(wěn)定性。
2 系統(tǒng)總體設(shè)計(jì)
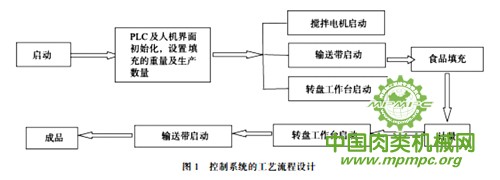
本研究提出了針對(duì)食品的機(jī)械自動(dòng)定量填充系統(tǒng)的設(shè)計(jì),該系統(tǒng)主要由伺服控制、人機(jī)交互以及智能控制系統(tǒng)組成。其智能自動(dòng)化控制主要由西門子公司的S7-200系列的CPU226的可編程邏輯控制器(programmable logic controller, PLC)及相關(guān)模塊組成,采用模糊比例-積分-微分 控制算法(proportion integral derivative, PID), 實(shí)現(xiàn)了預(yù)期的要求。其控制系統(tǒng)的工藝流程設(shè)計(jì)如圖1所示。
3 控制系統(tǒng)硬件設(shè)計(jì)
控制系統(tǒng)的穩(wěn)定性是由被控制的對(duì)象、生產(chǎn)工藝水平以及系統(tǒng)的性能等因素決定的。在對(duì)其進(jìn)行設(shè)計(jì)時(shí), 系統(tǒng)的控制器、伺服控制元件、具體執(zhí)行元件的設(shè)計(jì)及選型將直接影響到整個(gè)食品填充機(jī)械系統(tǒng)的工作性能。
PLC的控制技術(shù)是將自動(dòng)化技術(shù)與計(jì)算機(jī)技術(shù)結(jié)合的新型工業(yè)控制技術(shù)。PLC的通用性好,使用方便,操作簡(jiǎn)單,程序設(shè)計(jì)人員可以采用指令編程、梯形圖、功能塊的編程語言完成需要的動(dòng)作。因此,根據(jù)輸入/輸出信號(hào)的數(shù)量、存儲(chǔ)器容量、控制要求,并且預(yù)留20%~30%的I/O(輸入/輸出)口數(shù)量, 并且考慮到現(xiàn)場(chǎng)生產(chǎn)環(huán)境的惡劣性及現(xiàn)有生產(chǎn)對(duì)設(shè)備的穩(wěn)定性要求, 本設(shè)計(jì)選用西門子公司的S7-200系列的CPU226作為本系統(tǒng)的控制核心。其伺服系統(tǒng)驅(qū)動(dòng)器根據(jù)選用松下A5系列MDDHT7364E編碼器,伺服電機(jī)選用了同一家的松下的MDME202GCG電機(jī)。
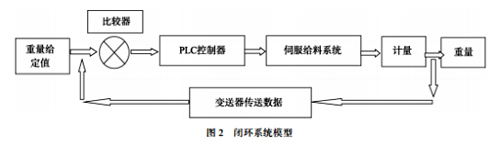
該系統(tǒng)采用閉環(huán)設(shè)計(jì),能夠及時(shí)反饋給量進(jìn)行計(jì)量后的數(shù)值,并對(duì)其進(jìn)行修正,最終實(shí)現(xiàn)精確控制,其閉環(huán)系統(tǒng)模型如圖2所示。
4 控制系統(tǒng)軟件設(shè)計(jì)
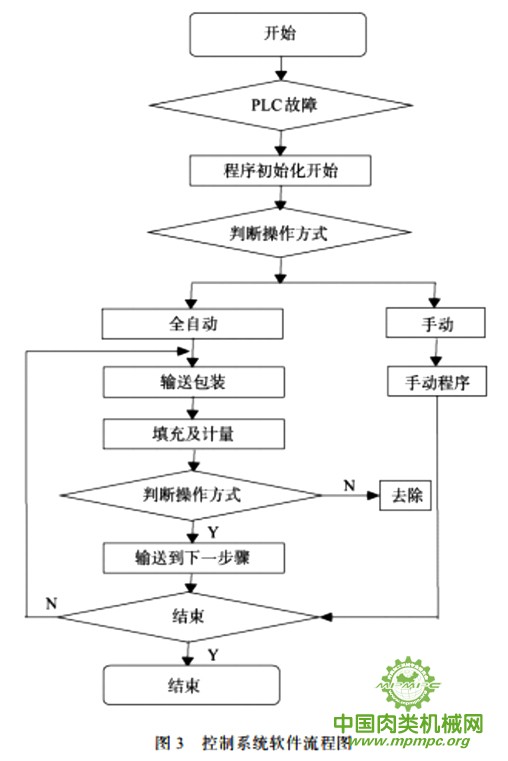
根據(jù)需要實(shí)現(xiàn)的功能,本系統(tǒng)的軟件程序主要由初始化程序、自動(dòng)程序、手動(dòng)程序、計(jì)量稱重以及伺服控制程序組成,其流程圖如圖3所示。
本設(shè)計(jì)選用的控制器為SIEMENS公司的S7-200系列的PLC,因此在軟件開發(fā)過程中選用了西門子公司基于Windows平臺(tái)專門為SIMATIC200系列特別開發(fā)的編程軟件的編程軟件STEP7-Micro/WIN32。通過該編程軟件編寫的控制程序, 在完成用戶的程序設(shè)計(jì)的同時(shí),還對(duì)用戶程序的運(yùn)行狀態(tài)進(jìn)行實(shí)時(shí)監(jiān)視,并對(duì)編寫的程序進(jìn)行仿真,大大提高了工作效率。在機(jī)界面選用了SIEMENS的WinCC Flexible(工業(yè)全集成自動(dòng)化軟件)。
具體界面設(shè)計(jì)如圖4所示, 可以方便地對(duì)其進(jìn)行手動(dòng)或自動(dòng)操作,同時(shí)兼有報(bào)警、監(jiān)控等功能。

5 模糊 PID控制器的設(shè)計(jì)
為了提高工作效率,并提高填充控制系統(tǒng)的精度及其穩(wěn)定性,本設(shè)計(jì)采用將PID控制與模糊算法相結(jié)合的模糊PID控制算法。模糊控制理論從20世紀(jì)中后期在具體實(shí)際中進(jìn)行了應(yīng)用,由于其簡(jiǎn)單實(shí)用及魯棒性強(qiáng)等優(yōu)點(diǎn),被廣泛使用。應(yīng)用模糊控制理論與實(shí)際應(yīng)用相結(jié)合設(shè)計(jì)出模糊PID控制器, 模糊PID控制器主要由5部分組成, 包括輸入變量、輸出變量、模糊算法、推理規(guī)則和精確化算法,其包括3個(gè)主要的功能模塊:模糊化、模糊推理、精確化。
自動(dòng)定量充填控制系統(tǒng)采用PID與模糊PID分段控制的方法,可以提高控制系統(tǒng)的速度及精度。在填充階段,利用模糊PID控制使得輸出快速接近設(shè)定目標(biāo)值,同時(shí)保證填充系統(tǒng)的精度。模糊自適應(yīng)PID的輸入采取誤差e和誤差變化量ec作為輸入,參數(shù)Kp、Ki、Kd作為輸出。通過實(shí)際生產(chǎn)經(jīng)驗(yàn)的總結(jié),實(shí)現(xiàn)自動(dòng)PID參數(shù)的調(diào)整,模糊PID控制系統(tǒng)框圖如圖5所示。
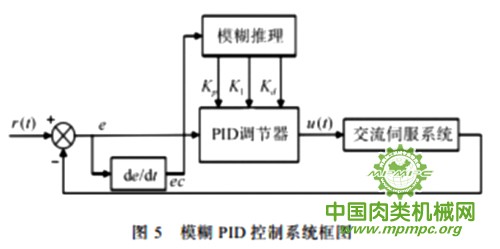
模糊PID控制器由模糊控制器與普通PID共同組成??梢岳媚:刂埔?guī)則對(duì)PID中的各項(xiàng)參數(shù)進(jìn)行調(diào)整以降低誤差及誤差變化率。根據(jù)現(xiàn)場(chǎng)實(shí)際經(jīng)驗(yàn)及查找資 料得出了模糊控制參數(shù)的整定,設(shè)計(jì)完成了模糊PID控制器。
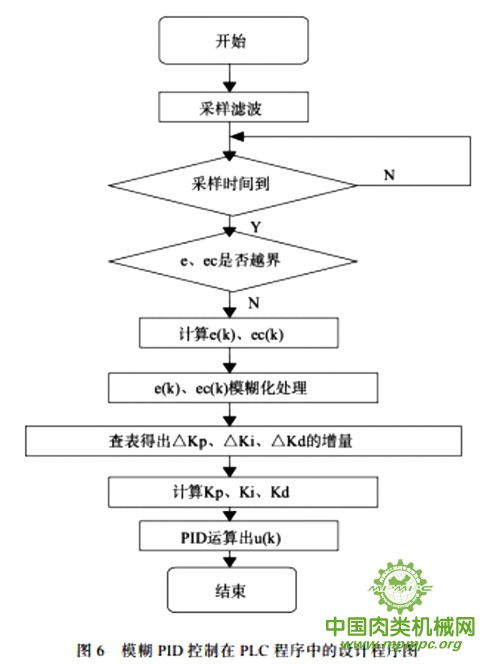
本系統(tǒng)預(yù)計(jì)設(shè)計(jì)填充重量的誤差|e|≤2g, 因此當(dāng)|e|>30g 時(shí)采用常規(guī)PID控制,當(dāng)|e|≤30g時(shí), 采用模糊 PID控制。偏差e的基本論域采用(-15,15), 劃分為7個(gè)等級(jí), 即E={-3, -2, -1, 0, 1, 2, 3}, 則偏差e的量化因子=3/15=0.2,偏差率ec的基本論域使用(-30, 30),劃分為7個(gè)等級(jí), 即EC={-3, -2, -1, 0, 1, 2, 3},偏差ec的量化因子Kec=3/30=0.1。Kp、Ki、Kd的論域分別為[-0.3, 0.3]、[-0.06, 0.06]、[-3, 3],糊子集定義為:{NB, NM, NS, ZO, PS, PM, PB},其元素分別表示為負(fù)大、負(fù)中、負(fù)小、零、正小、正中、正大。模糊PID控制在PLC程序中的設(shè)計(jì)程序圖如圖6所示。
模糊PID控制在很多領(lǐng)域已經(jīng)實(shí)證是有效提高速度、精度, 降低誤差的方式之一, 因此本設(shè)計(jì)提出的在食品機(jī)械自動(dòng)定量填充系統(tǒng)中的應(yīng)用從理論上也是切實(shí)可行的。而且研究證明,在加入模糊PID控制算法后,系統(tǒng)誤差大大減小,填充時(shí)間加快。
6 實(shí)際產(chǎn)品應(yīng)用
選用嬰幼兒奶粉這種粉末狀食品作為實(shí)驗(yàn)對(duì)象,嬰幼兒奶粉包裝規(guī)格通常有3種, 400、800、900g, 每個(gè)重量段平行實(shí)驗(yàn)10次, 具體數(shù)據(jù)如表1~3。
在400g重量段,填充重量為(400.35±4.692)g, 填充時(shí)間平均值為(4.97±0.170)s;在800g重量段,填充重量平均值(800.47±7.098)g,填充時(shí)間平均值為(5.92±0.123)s;在900g重量段,填充重量平均值(899.98±8.870)g,填充時(shí)間平均值為(6.43±0.080)s。
通過查證資料得知,現(xiàn)有填充設(shè)備在定量填充粉末狀食品時(shí),填充質(zhì)量變化率相對(duì)小于5%左右,本系統(tǒng)的填充質(zhì)量變化率小于2%,并且填充時(shí)間小于7s,系統(tǒng)的精度大大提高,達(dá)到穩(wěn)定的時(shí)間較快,加大了生產(chǎn)效率,并且系統(tǒng)在實(shí)驗(yàn)過程中運(yùn)行穩(wěn)定,穩(wěn)定性較高。
表1 400g重量段填充實(shí)驗(yàn)結(jié)果(n=10)
| 序號(hào) | 標(biāo)定重量/g | 實(shí)際重量/g | 絕對(duì)誤差/g | 相對(duì)誤差/% | 填充時(shí)間/s |
| 1 | 400 | 397.25 | -2.75 | 0.69 | 4.85 |
| 2 | 400 | 404.64 | 4.64 | 1.16 | 5.03 |
| 3 | 400 | 395.82 | -4.18 | 1.05 | 4.66 |
| 4 | 400 | 406.26 | 6.26 | 1.56 | 4.95 |
| 5 | 400 | 399.63 | -0.37 | 0.09 | 5.03 |
| 6 | 400 | 402.05 | 2.05 | 0.51 | 4.87 |
| 7 | 400 | 407.72 | 7.72 | 1.93 | 5.17 |
| 8 | 400 | 394.95 | -5.05 | 1.26 | 5.11 |
| 9 | 400 | 401.77 | 1.77 | 0.44 | 4.79 |
| 10 | 400 | 399.44 | -6.56 | 1.64 | 5.23 |
表2 800g填充實(shí)驗(yàn)結(jié)果(n=10)
| 序號(hào) | 標(biāo)定重量/g | 實(shí)際重量/g | 絕對(duì)誤差/g | 相對(duì)誤差/% | 填充時(shí)間/s |
| 1 | 800 | 790.22 | -9.78 | 1.22 | 5.68 |
| 2 | 800 | 795.87 | -4.13 | 0.52 | 6.01 |
| 3 | 800 | 804.37 | 4.37 | 0.55 | 6.08 |
| 4 | 800 | 801.45 | 1.45 | 0.18 | 5.89 |
| 5 | 800 | 798.54 | -1.46 | 0.18 | 5.92 |
| 6 | 800 | 802.87 | 2.87 | 0.36 | 6.11 |
| 7 | 800 | 808.01 | 8.01 | 1.00 | 5.79 |
| 8 | 800 | 787.34 | -12.66 | 1.58 | 5.96 |
| 9 | 800 | 805.92 | 5.92 | 0.74 | 5.85 |
| 10 | 800 | 810.12 | 10.12 | 1.27 | 5.9 |
表3 900g填充實(shí)驗(yàn)結(jié)果(n=10)
| 序號(hào) | 標(biāo)定重量/g | 實(shí)際重量/g | 絕對(duì)誤差/g | 相對(duì)誤差/% | 填充時(shí)間/s |
| 1 | 900 | 888.24 | -11.76 | 1.31 | 6.42 |
| 2 | 900 | 909.75 | 9.75 | 1.08 | 6.38 |
| 3 | 900 | 912.01 | 12.01 | 1.33 | 6.5 |
| 4 | 900 | 892.82 | -7.18 | 0.80 | 6.34 |
| 5 | 900 | 896.95 | -3.05 | 0.34 | 6.47 |
| 6 | 900 | 910.27 | 10.27 | 1.14 | 6.6 |
| 7 | 900 | 904.22 | 4.22 | 0.47 | 6.55 |
| 8 | 900 | 890.64 | -9.36 | 1.04 | 6.49 |
| 9 | 900 | 905.34 | 5.34 | 0.59 | 6.37 |
| 10 | 900 | 889.54 | -10.46 | 6.51 | 6.51 |
7 結(jié)論
由于食品機(jī)械自動(dòng)定量填充系統(tǒng)是一個(gè)動(dòng)態(tài)的平衡過程控制,填充食品的種類、大小、速度、機(jī)械振動(dòng)等都可以干擾其速度、精度,因此選擇合適的控制算法是其設(shè)計(jì)過程的關(guān)鍵。本設(shè)計(jì)提出的模糊PID算法有效地提高食品機(jī)械自動(dòng)定量填充系統(tǒng)的精度、速度及穩(wěn)定性,因此本設(shè)計(jì)是切實(shí)可行的。
自動(dòng)定量填充系統(tǒng)作為食品機(jī)械的一個(gè)重要組成,其性能穩(wěn)定,高精度和耐操性,決定是否作為先進(jìn)技術(shù)迅速占領(lǐng)市場(chǎng)的決定性因素。目前市面上大部分食品自動(dòng)填充機(jī)械控制算法所采用的還是簡(jiǎn)單PID控制,該控制系統(tǒng)雖然簡(jiǎn)單、實(shí)用,穩(wěn)定性較好,但在精度和速度方面還存在很大的欠缺。本研究通過對(duì)自動(dòng)定量填充系統(tǒng)硬件、軟件系統(tǒng)的設(shè)計(jì),并通過模糊 PID算法在理論上提高了其填充精度與效率,大大地提高了該食品定量填充類機(jī)械的性能,對(duì)食品生產(chǎn)企業(yè),尤其是食品機(jī)械制造企業(yè)有很大的推廣價(jià)值。

用")

