



摘要:為解決食品生產(chǎn)種類多、差異大等原因造成難于分揀的問(wèn)題,以并聯(lián)機(jī)器人和視覺(jué)技術(shù)為基礎(chǔ),設(shè)計(jì)分揀系統(tǒng)的運(yùn)行方案。而目前對(duì)于復(fù)雜型包裝及體積小的食品,國(guó)內(nèi)外對(duì)其設(shè)計(jì)的分揀系統(tǒng)技術(shù)并不成熟。根據(jù)高速機(jī)器人視覺(jué)系統(tǒng)的功能需求,構(gòu)建了更精準(zhǔn)的不同食品定位和分級(jí)的硬件系統(tǒng),并完成控制系統(tǒng)的軟件程序設(shè)計(jì)。通過(guò)對(duì)整個(gè)系統(tǒng)的研究發(fā)現(xiàn)其能夠達(dá)到設(shè)計(jì)的要求,可有效地提高復(fù)雜包裝及小體積食品的分揀效率,降低人工勞動(dòng)的強(qiáng)度。
關(guān)鍵詞:食品;機(jī)器人;分揀系統(tǒng)
傳統(tǒng)的加工過(guò)程主要是利用人工進(jìn)行食品的分揀,生產(chǎn)的效率比較低,勞動(dòng)強(qiáng)度大。近年來(lái),機(jī)器人及其視覺(jué)技術(shù)在食品生產(chǎn)中發(fā)揮越來(lái)越重要的作用,主要是由于其精密化的加工制造、容易實(shí)現(xiàn)準(zhǔn)確定位、高速柔性化的運(yùn)動(dòng)等,已逐漸成為食品加工行業(yè)的發(fā)展趨勢(shì)。
食品生產(chǎn)的自動(dòng)分揀就是要將不同種類的物品根據(jù)不同的屬性進(jìn)行分離和歸類,使相同屬性的分配到同一個(gè)地方。其速度快、出錯(cuò)率極低,可為企業(yè)帶來(lái)巨大的經(jīng)濟(jì)效益。
國(guó)外運(yùn)用Delta并聯(lián)機(jī)器人的技術(shù)比較成熟,如ABB、BOSCH,實(shí)現(xiàn)了機(jī)器人的產(chǎn)業(yè)化。目前運(yùn)用到生產(chǎn)的機(jī)器人只有二自由度和三自由度兩種結(jié)構(gòu)形式的Delta機(jī)器人。中國(guó)并聯(lián)機(jī)器人的研究則相對(duì)滯后,尚處于起步階段,僅有部分大型企業(yè)使用。
根據(jù)中國(guó)食品生產(chǎn)的現(xiàn)狀,為了降低企業(yè)成本和提高食品的合格率,設(shè)計(jì)了符合中國(guó)國(guó)情的高速分揀系統(tǒng)。系統(tǒng)由計(jì)算機(jī)、運(yùn)動(dòng)控制器、CCD視覺(jué)系統(tǒng)和夾持器等組成。CCD視覺(jué)是系統(tǒng)能夠根據(jù)食品的圖像,運(yùn)用圖像算法,對(duì)食品進(jìn)行分級(jí)和判斷,進(jìn)而通過(guò)控制器驅(qū)動(dòng)并聯(lián)機(jī)器人實(shí)現(xiàn)分揀操作??梢哉f(shuō)普通分揀系統(tǒng)在中國(guó)已經(jīng)走向成熟化,已經(jīng)達(dá)到了國(guó)際先進(jìn)水平,但對(duì)一些非典型食品的分揀技術(shù)還沒(méi)有比較完善的系統(tǒng)。非典型食品即食品本身形狀或外包裝復(fù)雜,靠傳統(tǒng)分揀系統(tǒng)無(wú)法確定其重心并穩(wěn)固夾持分揀的新型食品。
本設(shè)計(jì)針對(duì)形狀復(fù)雜和重量體積存在差異的產(chǎn)品,在原有成熟分揀系統(tǒng)的基礎(chǔ)上,擬對(duì)并聯(lián)機(jī)器人的執(zhí)行機(jī)構(gòu)進(jìn)行針對(duì)性改進(jìn),使其可以實(shí)現(xiàn)對(duì)形狀復(fù)雜的食品穩(wěn)定牢靠夾持,采用Delta并聯(lián)的機(jī)構(gòu)和基于CCD元件的視覺(jué)新技術(shù),完善非典型食品的圖像采集及精準(zhǔn)外形結(jié)構(gòu)分析,并完成對(duì)系統(tǒng)的軟件控制,以實(shí)現(xiàn)非典型食品快速和穩(wěn)定的分揀。
1 分揀系統(tǒng)原理分析
1.1 分揀系統(tǒng)的設(shè)計(jì)原則
分揀系統(tǒng)就是基于機(jī)器視覺(jué)、機(jī)器人運(yùn)動(dòng)控制的先進(jìn)技術(shù),是面向食品包裝后高速分揀的分裝系統(tǒng)(見圖1、2),由工控機(jī)器、運(yùn)動(dòng)控制器、并聯(lián)機(jī)器人、夾持器和基于工業(yè)相機(jī)的機(jī)器視覺(jué)系統(tǒng)組成。因此結(jié)合其工作的特點(diǎn)確定如下原則:
?。?)系統(tǒng)的簡(jiǎn)化性。由于工作的系統(tǒng)需要很多結(jié)構(gòu)的配合,給功能的實(shí)現(xiàn)帶來(lái)了困難,應(yīng)盡量降低結(jié)構(gòu)的復(fù)雜程度。
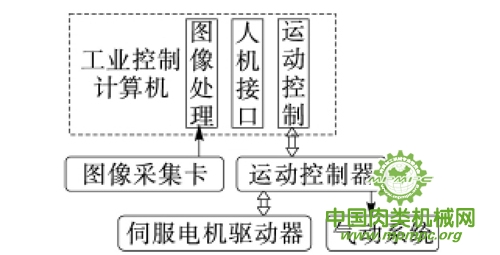
圖1 分揀系統(tǒng)控制流程圖
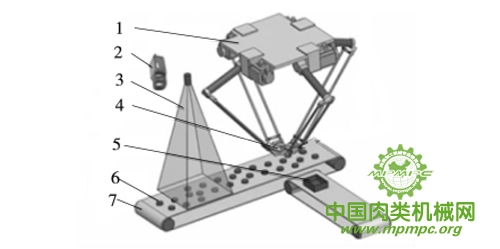
1.并聯(lián)機(jī)器人 2.工業(yè)相機(jī) 3.LED光源 4.夾持器 5.包裝箱 6.食品 7.輸送帶
圖2 高速并聯(lián)機(jī)器人自動(dòng)分裝系統(tǒng)
?。?)系統(tǒng)的柔性化。食品的多樣性需要不同的工作模式,因此需要兼容以及復(fù)合的操作才能精確地實(shí)現(xiàn)不同類型食品的分揀。
?。?)系統(tǒng)的損傷最小。當(dāng)分揀的系統(tǒng)進(jìn)行拾取動(dòng)作時(shí),應(yīng)盡量避免對(duì)食品的破壞,以保持原有的產(chǎn)品屬性。
1.2 系統(tǒng)組成和工作原理
以并聯(lián)機(jī)器人為基礎(chǔ),設(shè)計(jì)一個(gè)能夠運(yùn)用機(jī)器視覺(jué)技術(shù)的食品分揀系統(tǒng)平臺(tái)。它主要由硬件和軟件組成(見圖3)。硬件主要由計(jì)算機(jī)、運(yùn)動(dòng)控制器、Delta機(jī)構(gòu)、夾具和工業(yè)視覺(jué)系統(tǒng)組成。軟件主要由分揀系統(tǒng)控制平臺(tái)和視覺(jué)控制組成。
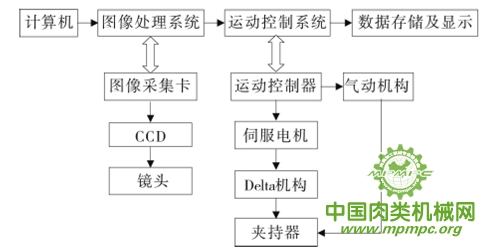
圖3 自動(dòng)分揀系統(tǒng)組成圖
高速機(jī)器人分揀系統(tǒng)的工作原理(見圖4):當(dāng)食品進(jìn)入作業(yè)區(qū)域時(shí),上位機(jī)利用CCD完成食品圖像采集,運(yùn)用機(jī)器視覺(jué)技術(shù)對(duì)圖像進(jìn)行運(yùn)算分析,完成對(duì)運(yùn)動(dòng)目標(biāo)狀態(tài)的跟蹤;此時(shí)通過(guò)控制系統(tǒng)的下位機(jī)完成并聯(lián)機(jī)構(gòu)和夾持器的操作,將目標(biāo)物放到指定位置,進(jìn)而實(shí)現(xiàn)食品的自動(dòng)分揀。
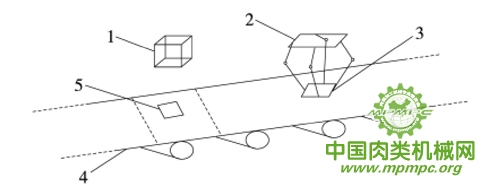
1.工業(yè)相機(jī) 2.并聯(lián)機(jī)器人 3.夾持器 4.傳送帶 5.食品
圖4 分揀系統(tǒng)原理圖
2 基于分揀系統(tǒng)的功能分析
2.1 并聯(lián)機(jī)器人系統(tǒng)分析及改進(jìn)方案
現(xiàn)有并聯(lián)機(jī)器人(圖5)具有良好的動(dòng)態(tài)性能、高速度以及高精度的特點(diǎn),已在工業(yè)領(lǐng)域取得巨大的效益。它主要是由動(dòng)靜平臺(tái)、主從動(dòng)臂、伺服電機(jī)、驅(qū)動(dòng)部件以及執(zhí)行器等組成。執(zhí)行器采用真空吸盤,擺臂由安川交流伺服電機(jī)驅(qū)動(dòng),精度可達(dá)±0.08mm。
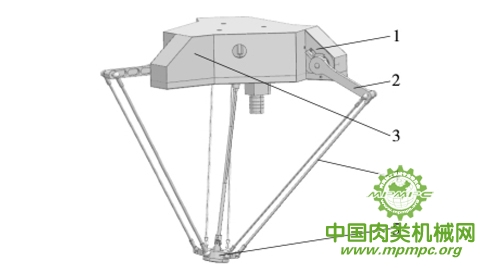
1. 伺服電機(jī) 2.主動(dòng)臂 3.靜平臺(tái) 4.從動(dòng)臂 5.執(zhí)行器
圖5 Delta并聯(lián)機(jī)器人三維模型
當(dāng)整個(gè)機(jī)構(gòu)發(fā)生運(yùn)動(dòng)時(shí),平行四邊形結(jié)構(gòu)會(huì)限制其轉(zhuǎn)動(dòng),留下末端執(zhí)行器的3個(gè)平動(dòng)自由度。此外,還可以運(yùn)用不同的算法,求解機(jī)構(gòu)的正解和逆解,對(duì)機(jī)構(gòu)的實(shí)時(shí)運(yùn)動(dòng)狀態(tài)進(jìn)行控制。但對(duì)于體積小的包裝食品,其生產(chǎn)流水線比較精密,所以對(duì)并聯(lián)機(jī)器人尺寸及工作空間要求也非常嚴(yán)格。由于食品體積小且包裝復(fù)雜,所以要求并聯(lián)機(jī)器人執(zhí)行機(jī)構(gòu)的定位精度及抓夾力度都要有所變動(dòng)。此外,主動(dòng)臂、從動(dòng)臂的結(jié)構(gòu)及配合形式也要有所改進(jìn),在進(jìn)行平動(dòng)和轉(zhuǎn)動(dòng)時(shí)需要更多的可操作位置,以克服3個(gè)平動(dòng)自由度的不足。
2.2 視覺(jué)技術(shù)系統(tǒng)分析引用
對(duì)于運(yùn)動(dòng)食品的圖像采集,采用的是基于CCD的工業(yè)相機(jī),能很好地實(shí)現(xiàn)信號(hào)的穩(wěn)定性采集和高速率的傳輸?shù)?。?xiàng)目采用的是大恒圖像科技有限公司MER-030-120UM/UC系列攝像機(jī),分辨率656×492、幀率120 fps、像素尺寸5.6μm×5.6μm,傳感器是Sony lCX618CCD,數(shù)據(jù)的接口采用USB2.0,鏡頭安裝的方式采用C固定架。它的外形尺寸為29mm×29mm×29mm,比較緊湊。
現(xiàn)有視覺(jué)技術(shù)已經(jīng)比較成熟,光譜可以是黑白或者彩色的,能夠在復(fù)雜的環(huán)境下完成工作,具有很高的可靠性。例如,圖6所示的巧克力食品,可先利用SherIock的圖像選擇、邊緣提取、圖像增強(qiáng)等功能,確定巧克力的邊緣曲線;再通過(guò)所開發(fā)的機(jī)器視覺(jué)軟件,確定邊緣曲線的中心點(diǎn)、拐點(diǎn)和旋轉(zhuǎn)角。
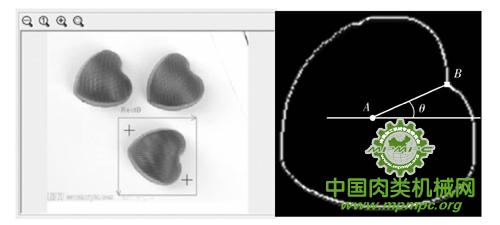
圖6 食品的特征提取示例
2.3 數(shù)據(jù)采集系統(tǒng)改善方式
一般分揀系統(tǒng)在完成圖像采集時(shí),會(huì)通過(guò)數(shù)據(jù)總線傳至PC機(jī),此時(shí)主控制器根據(jù)內(nèi)部不同模塊功能完成處理,進(jìn)而對(duì)運(yùn)動(dòng)控制器發(fā)送指令。對(duì)于典型食品的圖像處理,由于其外觀形狀比較規(guī)則,一般可通過(guò)圖像采集、邊緣提取、圖像增強(qiáng)和特征分析等方法提取分揀食品的特征。而對(duì)于精密型食品圖像采集需要更高的采集方式。主要考慮對(duì)非典型食品分揀時(shí)中心點(diǎn)的選取以及對(duì)不規(guī)則外觀包裝的識(shí)別兩個(gè)方面。圖像采集系統(tǒng)主要包括基于CCD的工業(yè)相機(jī)、圖像采集卡、PC機(jī)和顯示器。它們之間的連接方式見圖7。運(yùn)動(dòng)控制系統(tǒng)包括運(yùn)動(dòng)的控制卡、驅(qū)動(dòng)器、交流伺服電機(jī)等,它們之間的數(shù)據(jù)交換主要是基于PCI的數(shù)據(jù)總線來(lái)進(jìn)行通訊的。
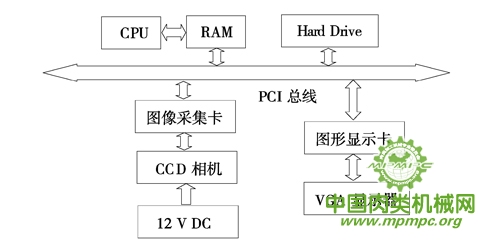
圖7 圖像采集系統(tǒng)
3 分揀系統(tǒng)的軟件分析改善
面向食品機(jī)器人的分揀系統(tǒng)的軟件設(shè)計(jì)主要包括人機(jī)交互界面、機(jī)器視覺(jué)軟件系統(tǒng)以及運(yùn)動(dòng)控制部分。其中交互界面是操作人員能夠直接接觸和控制的;視覺(jué)系統(tǒng)主要有圖像的采集、特征的識(shí)別以及數(shù)據(jù)的傳輸?shù)冉M成;運(yùn)動(dòng)的控制部分主要針對(duì)正反解。這3個(gè)部分是相互關(guān)聯(lián)的,當(dāng)相機(jī)采集到圖像后,操作人員就會(huì)對(duì)界面的信息進(jìn)行分析和處理,然后通過(guò)視覺(jué)系統(tǒng)反饋給末端控制部分,執(zhí)行相應(yīng)的動(dòng)作,完成整個(gè)系統(tǒng)的工作要求。
系統(tǒng)軟件的工作流程為:工業(yè)相機(jī)拍攝運(yùn)動(dòng)食品的圖像,這些信號(hào)會(huì)被傳輸?shù)綀D像采集卡的輸入端口,在采集卡的內(nèi)部將模擬信號(hào)轉(zhuǎn)化為數(shù)字圖像,計(jì)算機(jī)程序會(huì)根據(jù)圖像的特征生成相應(yīng)的控制指令,通過(guò)數(shù)據(jù)總線發(fā)送給控制臺(tái)??刂乒裨诘玫街噶詈?,會(huì)將脈沖傳到交流伺服電機(jī)上,實(shí)現(xiàn)食品的分揀動(dòng)作。在食品拾取的過(guò)程中,機(jī)器的視覺(jué)技術(shù)要解決的問(wèn)題有工業(yè)相機(jī)的標(biāo)定、目標(biāo)的識(shí)別以及動(dòng)態(tài)目標(biāo)的追蹤,運(yùn)動(dòng)控制問(wèn)題主要是指并聯(lián)機(jī)器人的不同動(dòng)作。
分揀系統(tǒng)工作的主要流程見圖8。

圖8 系統(tǒng)軟件的工作流程
3.1 視覺(jué)技術(shù)系統(tǒng)總體設(shè)計(jì)
3.1.1 工業(yè)相機(jī)標(biāo)定 工業(yè)相機(jī)的標(biāo)定就是指目標(biāo)對(duì)象的像素坐標(biāo)到使用場(chǎng)景坐標(biāo)的變換。完成相機(jī)的標(biāo)定,對(duì)運(yùn)動(dòng)食品的定位有很重要的作用。它能清晰的發(fā)現(xiàn)對(duì)象在實(shí)際坐標(biāo)中的位置。通常運(yùn)用小孔成像的模型來(lái)計(jì)算,算法采用直接線性的方法,通過(guò)實(shí)驗(yàn)進(jìn)行驗(yàn)證。分揀系統(tǒng)的標(biāo)定能夠有效和精確地發(fā)現(xiàn)目標(biāo),從而為后續(xù)的目標(biāo)追蹤和末端執(zhí)行奠定基礎(chǔ)。
3.1.2 目標(biāo)的檢測(cè)識(shí)別 分揀系統(tǒng)發(fā)現(xiàn)目標(biāo)后,就要確定對(duì)象的類別。對(duì)于大多數(shù)的食品都具有規(guī)則的外形,一般采取圖像的邊緣提取和特征分析來(lái)完成。但是也存在著不規(guī)則的食品,此時(shí)就要根據(jù)它們的特征點(diǎn)或者記錄其外形曲線來(lái)進(jìn)行識(shí)別。
3.1.3 動(dòng)態(tài)追蹤 當(dāng)獲得目標(biāo)對(duì)象的軌跡后,系統(tǒng)會(huì)分析其運(yùn)動(dòng)的狀況,從而采取下一步的動(dòng)作。分揀系統(tǒng)的動(dòng)態(tài)追蹤能夠?qū)崟r(shí)地記錄對(duì)象的狀態(tài),為拾取提供可靠的信息。
另外,分揀系統(tǒng)主要采用的是GNN的算法以及通用的濾波算法。食品的運(yùn)動(dòng)信息得到追蹤后,計(jì)算機(jī)就會(huì)提取有效信息,可以有效預(yù)測(cè)未來(lái)的運(yùn)動(dòng)狀態(tài),加強(qiáng)對(duì)目標(biāo)行為的理解。
機(jī)器視覺(jué)軟件開發(fā)可采用全自主開發(fā)或利用專用機(jī)器視覺(jué)軟件開發(fā)。但全自主開發(fā)方式的開發(fā)工作量大、周期長(zhǎng)、可靠性低。所以目前工業(yè)市場(chǎng)多采用專業(yè)機(jī)器視覺(jué)軟件開發(fā)。
3.2 圖像采集系統(tǒng)開發(fā)
典型食品在進(jìn)行機(jī)器視覺(jué)系統(tǒng)的圖像采集時(shí),主要有以下兩種方式:① 利用圖像采集卡采集圖像;② 利用現(xiàn)在比較常用的工業(yè)相機(jī)采集圖像。本設(shè)計(jì)就是以工業(yè)相機(jī)為基礎(chǔ)的二次開發(fā)式設(shè)計(jì)。
工業(yè)相機(jī)采集圖像具有信號(hào)質(zhì)量好、傳輸快、性能穩(wěn)定的特點(diǎn),而且在食品分揀上有著廣泛的應(yīng)用。對(duì)于非典型食品分揀來(lái)說(shuō),圖像采集軟件系統(tǒng)要有處理不規(guī)則食品的特征點(diǎn)和轉(zhuǎn)角,這就需要軟件開發(fā)的智能化和大數(shù)據(jù)化。而且要以食品圖像處理的實(shí)時(shí)性為其設(shè)計(jì)的主要因素,非典型食品的實(shí)時(shí)性也是圖像采集軟件部分的主要突破口。對(duì)于采集圖像的工業(yè)相機(jī)也要提高其分辨率,可以采用DALSA公司生產(chǎn)的Genie系列的工業(yè)相機(jī),該系列相機(jī)是基于千兆以太網(wǎng)通信協(xié)議開發(fā),分辨率可達(dá)到640×480、幀/行頻64 fps、像元尺寸7.4μm、GigE-Vision數(shù)據(jù)接口。
3.3 機(jī)器人的控制改進(jìn)
當(dāng)機(jī)器人系統(tǒng)的視覺(jué)技術(shù)設(shè)計(jì)完成后,計(jì)算機(jī)就會(huì)根據(jù)要求發(fā)出指令控制其運(yùn)動(dòng)的軌跡。選用的交流伺服電機(jī)為安川公司生產(chǎn)的MOTOMAN系列,它能夠讓系統(tǒng)調(diào)用庫(kù)函數(shù),函數(shù)調(diào)用完成后就會(huì)以串口向控制器發(fā)送運(yùn)動(dòng)指令,由主、從動(dòng)臂實(shí)現(xiàn)運(yùn)動(dòng)。
PC機(jī)與運(yùn)動(dòng)控制器是以RS232建立連接的,它們之間的互通需要一定的通信協(xié)議。對(duì)于串口的連接,需要設(shè)置通信的參數(shù),如波特率、數(shù)據(jù)位等。當(dāng)取得通信的庫(kù)函數(shù)和參數(shù)的標(biāo)準(zhǔn)設(shè)置后,就完成了它們之間的通信,通信函數(shù)為:
Short cid= Bsc Open(“./”,1)。
當(dāng)前運(yùn)動(dòng)姿勢(shì)的獲取,需要連接不同的數(shù)據(jù),函數(shù)設(shè)置為Bsc Connect(cid)。移動(dòng)時(shí),需要調(diào)用BsclsRobotPos(cid,“BASE”,O,&robotConf,&currentToolNo,robotPosi-tion)。完成這些動(dòng)作之后,運(yùn)用函數(shù)BscClose(cid)即可關(guān)閉之前所有的通信連接。
在運(yùn)行夾持食品的程序時(shí),每當(dāng)夾持動(dòng)作結(jié)束后,程序會(huì)立即返回,導(dǎo)致程序報(bào)錯(cuò)或者指令得不到執(zhí)行。因此在完成編程后,應(yīng)該及時(shí)檢查程序或者保持較快的運(yùn)動(dòng)速度。
4 非典型食品分揀系統(tǒng)的實(shí)現(xiàn)
當(dāng)系統(tǒng)的硬件和軟件完成后,就要檢驗(yàn)分揀系統(tǒng)的可靠性。它的主要操作分為識(shí)別、抓取、分揀。對(duì)于非典型食品分揀來(lái)說(shuō),要克服典型食品外形狀的復(fù)雜性,機(jī)械結(jié)構(gòu)上要解決兩個(gè)問(wèn)題:① 在抓取工序上進(jìn)行傳統(tǒng)技術(shù)升級(jí),也就是并聯(lián)機(jī)器人的多關(guān)節(jié)設(shè)計(jì),要使并聯(lián)機(jī)器人具有臂轉(zhuǎn)動(dòng)的效果,就像汽車的鈑金焊接一樣,要使其焊接臂多自由度旋轉(zhuǎn)移動(dòng),還要保持其可靠度;② 在夾持器功能要進(jìn)行傳統(tǒng)性突破,傳統(tǒng)的吸附夾持已經(jīng)滿足不了非典型食品的夾持功能。對(duì)于非典型食品,在保證其外形不被破壞的條件下,可采用兩面夾緊夾持。這樣需要對(duì)食品外包裝強(qiáng)度進(jìn)行計(jì)算,來(lái)保證夾持力度及夾持可靠度。
而識(shí)別過(guò)程主要是圖像采集,對(duì)于不規(guī)則的非典型食品的圖像采集要考慮其中心位置和外觀形狀,以便于抓取工作的精準(zhǔn)度及抓取位置的選擇。
分揀過(guò)程就是通過(guò)軟件控制并聯(lián)機(jī)器人將食品從流水線上分裝到包裝箱的工作,此部分要注意的是本試驗(yàn)研究的是包裝復(fù)雜、體積小的食品分揀,所以機(jī)器抓取精度必須保障。另外,原有的分揀系統(tǒng)對(duì)控制性及校驗(yàn)方面做得不到位,因此新型分揀系統(tǒng)對(duì)于非典型食品也要有抓取成功與否的校驗(yàn)功能。有了校驗(yàn)?zāi)K,就可以保證分揀成功率,減少人為校驗(yàn)環(huán)節(jié)。識(shí)別、抓取、分揀3個(gè)步驟完成后,設(shè)置的軟件程序就會(huì)重復(fù)上面的操作,直到工作的完成。
5 結(jié)語(yǔ)
通過(guò)分析食品行業(yè)的生產(chǎn)現(xiàn)狀,設(shè)計(jì)了面向食品生產(chǎn)的高速機(jī)器人的分揀系統(tǒng)。根據(jù)分揀系統(tǒng)的總體方案,闡述其工作的過(guò)程和原理。該系統(tǒng)以機(jī)器人運(yùn)動(dòng)控制和視覺(jué)系統(tǒng)技術(shù)為基礎(chǔ),針對(duì)非典型食品的分揀從硬件和軟件兩個(gè)方面進(jìn)行設(shè)計(jì)。并完成了在原有分揀系統(tǒng)基礎(chǔ)上,分揀非典型食品夾持及圖像采集功能的改進(jìn)。經(jīng)可靠性檢測(cè)發(fā)現(xiàn)該系統(tǒng)能夠精確分揀,達(dá)到了非典型食品分揀的設(shè)計(jì)要求。機(jī)器人技術(shù)的使用不僅代替了復(fù)雜的人工勞動(dòng)、提高了生產(chǎn)的效率,而且還能保證動(dòng)作的精確執(zhí)行,自動(dòng)化的程度得到提高。設(shè)計(jì)的分揀系統(tǒng)能夠?qū)崿F(xiàn)食品的有效拾取和歸類,具有很大的運(yùn)用空間,可為相關(guān)分揀系統(tǒng)設(shè)計(jì)提供一定的參考。

用")

